
Total knee arthroplasty (TKA) is an established treatment option for individuals with symptomatic osteoarthritis in at least 2 of the 3 compartments of the knee and unsuccessful conservative treatment, aimed at alleviating pain and restoring function [1]. There has been an exponential rise in the number of TKA surgeries during recent years in India, from 1019 in 2006 to 27,000 in 2019 [2]. In recent years, robotic-assisted TKA (RA-TKA) has emerged as a notable advancement, offering enhanced precision in bone cuts, optimized implant positioning, and superior alignment. These factors are critical for the longevity and functionality of the knee prosthesis, potentially leading to improved patient outcomes compared to conventional TKA techniques [3]. The integration of robotic systems in orthopedic surgery continues to evolve, with an increasing emphasis on refining intraoperative techniques to minimize complications and maximize surgical success [4].
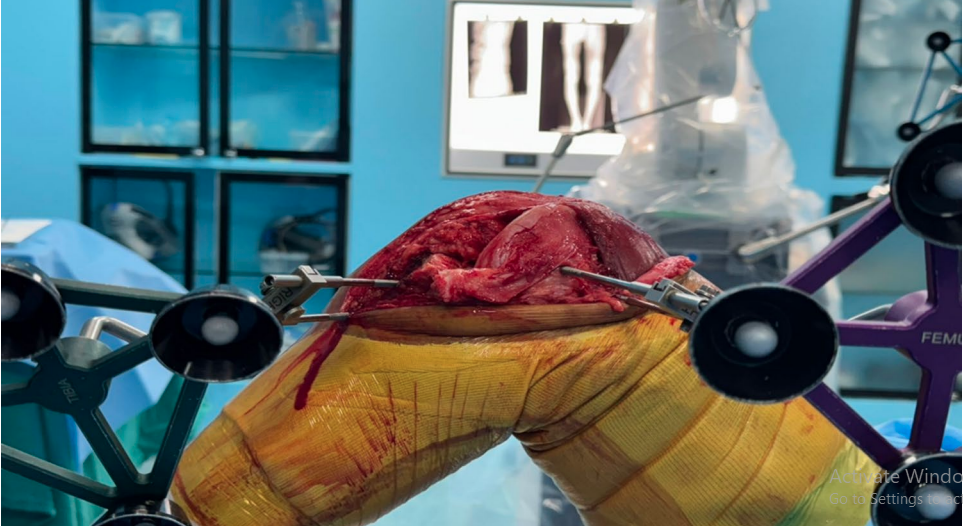
One of the critical considerations in RA-TKA is the placement of bone array tracker pins, which are essential for intraoperative navigation and real-time tracking of bone resection and implant positioning. Traditionally, these pins have been placed outside the operative field through separate incisions (extra-incisional placement), which, although effective, may introduce complications, such as pin-site fractures, infections, delayed wound healing, and quadriceps tethering, potentially leading to stiffness and compromised function [5]. While the literature has extensively documented the benefits of robotic precision in TKA, there remains a paucity of research examining the impact of different pin placement strategies on patient outcomes globally [5–7].
From the observations of our previous experiences with RA-TKA surgeries, the need for modifications in pin placement became evident to mitigate complications and enhance patient recovery. During the initial phases of using the fully active CUVIS robotic system, we encountered technical challenges wherein the trajectory of extra-incisional pins occasionally conflicted with the robotic arm’s predefined cutting path. This interference necessitated intraoperative adjustments, potentially affecting workflow efficiency and precision. Consequently, we explored various pin positioning techniques and ultimately adopted an intra-incisional placement approach for both femoral and tibial pins. The rationale behind this shift was to reduce additional incisions, minimize soft-tissue trauma, and potentially lower the incidence of pin-related complications [8].
This retrospective analysis aims to compare intraincisional and extra-incisional pin placement techniques
in RA-TKA using the fully active robotic system. As pin placement plays a critical role in procedural efficiency and post-operative recovery, evaluating its impact can provide valuable insights for refining surgical techniques. This study seeks to contribute to the growing body of RA-TKA literature by assessing the safety profile, complication rates, and functional recovery associated with intra-incisional versus extra-incisional pin placement.